- 科技報導
文章專區
2022-03-15宛如「天眼」!加上人工智慧的空拍機有哪些突破與應用潛力?
483 期
Author 作者
陳朝鵬/國立陽明交通大學智慧科學暨綠能學院碩士研究生。陳柏豪/國立陽明交通大學智慧科學暨綠能學院碩士研究生。謝君偉/國立陽明交通大學智慧計算研究所教授。
無人機載具有高度移動性以及遠距遙控功能,能夠快速輕易到達不容易接近的區域,而搭配高解析度相機就可以如同鷹眼,從空中俯視地表,並將地表一切變化詳實記錄在影像中而不遺漏。臺灣環境多山且地形複雜,可應用無人機最大的優點「機動性」,能夠快速且輕易到達不容易接近的山區或危險地區,在環境嚴苛的狀況下完成任務。
另一方面,人工智慧(artificial intelligence, AI)近年來於多方領域展現驚人成效,不管在自動車駕駛、智慧醫療、製藥(蛋白質三維結構分析)、量子物理求解,都得到過去無可想像的驚人成果。結合AI技術,無人機將成為人類社會中不可或缺的重要工具,在未來生活提供多樣化的應用,如:貨物運輸、安全巡邏、環境探勘、軍事偵察、災難救助、國防後勤、農作物產量預估等。而如果在無人機上額外搭載了高解析度(3840×2160)攝影機加上AI處理平台,便能即時大範圍地巡邏環境或掃描地形,可適用於智慧農業或地理資源調查(如水庫、河川)等,也可以用在慶典上面的無人機排字展示等功能。
有鑑於上述重要性,在過去4年裡,國立陽明交通大學於2018∼2021年執行科技部AI專案計畫,發展應用於無人機自主感測與飛控的人工智慧式「OpenDrone AI平台」,以期藉由人工智慧技術,使無人機能有自主飛行之能力,包括減少摔機、自動導航與避障等等。而再下4年,同樣獲得科技部補助,將利用無人機打造科技臺灣/韌性家園的重要目標。
無人機的3大研發主題
無人機應用主要可以分為3個主題:智慧控制(smart control)、智慧視覺定位(smart map)、智慧空拍偵測(smart vision),以下就各主題深入說明。
圖一:空拍無人機搭載嵌入AI平台與通訊系統(4G/5G),即時分析空拍影像。(作者提供)
智慧控制,讓操作更直覺簡易
近年來,無人飛行載具領域的發展日益增進,其中多旋翼無人機因其優異的特性如垂直起降、懸停、機械簡便性,而被廣泛使用。傳統的多旋翼無人機,包括四旋翼和六旋翼,經過最佳化可最大程度延長飛行時間,裝載各種感測器進行空中部屬,可實現快速且具有高度可操作性的平台。在過去的幾年中,無人機的飛行控制系統,已經從簡單的穩定性增強系統,發展到成熟的命令增強系統,從而為無人機的自主運行開闢了更多可能性。由於無人機體積小、成本低、敏捷性高,因此在各種類型的場域中存在多種應用,其中也包括多台無人機的協同任務規劃與執行。在這些操作中,無人機可以多機協同合作展現群體智慧、共同執行任務,例如2019年在屏東的臺灣燈會,就利用300架無人機進行空中燈光秀的表演。
另一方面,無人機執行任務時,通常利用視訊進行控制。而如果在飛行控制之外,想操作更複雜的指令,例如透過其上的機械手臂抓取物品,人機介面應該要往更加直覺的方向思考,甚至引入人工智慧來輔助控制機制。
考慮到此,陽明交通大學的建築所所長侯君昊開發出一款智慧控制系統,能夠將使用者雙手的姿態,以及身體於空間中移動的相對位置,經由智慧化的系統直覺的投射在無人機機械手臂上。這樣的設計在未來無人飛行載具的操作推廣上,能帶來以下優勢:擴增無人機能應付的情境;減少新手學習適應複雜任務時間;讓人與無人機控制更契合,相關資料也能幫助人工智慧模擬學習到更符合人類的控制行為。
智慧視覺定位,克服探勘惡劣地形
多旋翼無人機通過裝載各種感測器,可達成軍事、科學、農業、環保、資源調查等各方面需求,例如:軍事設備偵查、氣候監測、群眾分析、環境研究、橋樑檢測、營救和搜索行動,以及天氣預報等,提供了高效率的解決方案。不過,這些感測應用皆須配合「視覺定位」方能提供最具效率的應用服務。
過往的視覺定位,是以地面攝影機拍攝行人為主要目標對象,因此既有方法的優化目標都是以地面上所取得的場景資料集為主,多為平視或仰視角度從地面拍攝道路、街道、廣場或建築物景觀,作為定位依據。但是對於在高空中飛行的無人機來說,這些傳統的視覺定位資料,並不是最適用的訓練與測試影像。如能加以發展克服,相較於地面的攝影機,在高空中的無人機則可多了俯視的定位選擇,也就是利用從高空俯瞰地面所得到的影像來判斷它的位置,可直接探勘人類較難以到達的惡劣環境,例如於無人島嶼或洞穴環境進行探索,因而增加可完成的任務種類。
圖二:將視覺與手的感知投射至無人機。(作者提供)
圖三:智慧控制手套包含雙向的訊號:控制訊號與無人機抓具手指的感知訊號。(作者提供)
智慧空拍偵測,訓練AI找到目標物
利用無人空拍機的機動性,藉由空拍視訊來尋找、偵測與分析特定目標物,可延伸出許多重要的應用。舉例來說,可巡檢海岸線、沿著河岸搜尋可疑的人;颱風來襲後許多地方嚴重受損,可利用無人機的機動特性,進行災害巡檢、偵測或追蹤地面的生還者;在國防方面則可以尋找機場或坦克;於海洋上則可用於搜尋海洋汙染、海洋廢棄物;也可以應用在橋樑建築的檢測;更可利用無人機空拍照,估計車流、即時提供路況資訊;可應用在智慧農業上,做農產品產量分析與農損評估。在不同的場域巡邏尚有許多不同檢測應用,如電塔檢測、軌道檢測、風力機檢測、橋梁檢測、水庫檢測、港口檢測等。甚至可透過無人機搭配空拍偵測,進行瀕臨絕種動物如白海豚的族群調查。
使用無人機能輕易到達危險與極端環境,自由選定拍照位置,能捕捉更廣、更深入與更清晰的畫面。過去許多影像畫面都是透過人工的方式分析,隨著資料增多,如果想用自動的方式,可在無人機上搭配AI平台,訓練AI模型,利用深度的神經網路做相關物件分析與偵測。
在AI模型中, 最重要的一件事就是在原來的輸入影像中找到特徵(feature)。而要提取特徵,卷積(convolution)與池化(pooling)為兩個非常重要的運算方法。
卷積運算為輸入影像與特徵抽取過濾器(filter)間的一種運算過程,主要是將輸入影像每一個像素當作中心,鄰近的像素和過濾器相對位置的權重相乘後的總和,就是相對應的特徵,如圖四中右圖結果的橘底部分為卷積運算後的結果,計算過程如下:0×0+0×0+0×1+0×1+1×0+0×0+0×0+0×1+0×1=0。整張影像通過卷積運算後,就能找出影像的特徵(如圖五),而這些特徵就是深度學習架構要學習的重點,透過學習這些特徵,就能達到人工智慧的目標。
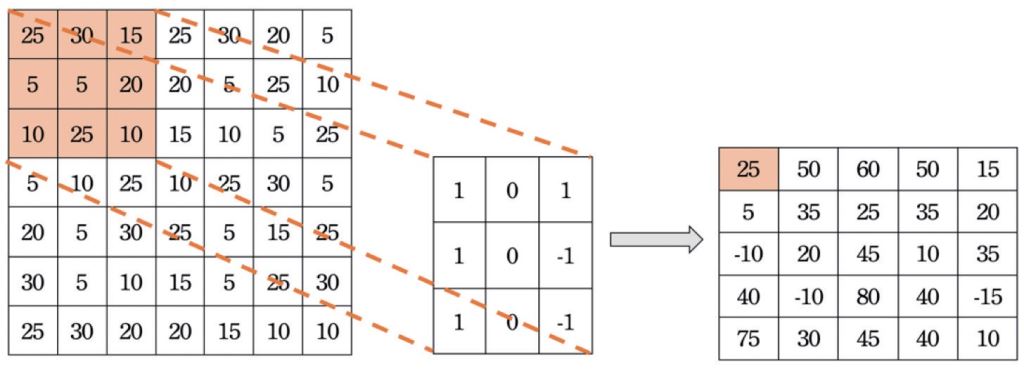
圖四:卷積運算流程。卷積運算為輸入影像與特徵抽取過濾器間的一種運算過程,主要是將輸入影像每一個像素當作中心,
鄰近的像素和過濾器相對位置的權重相乘後的總和,就是相對應的特徵(作者提供)
圖五:萃取出物體的不同特徵。(作者提供)
圖六:平均池化示意圖。(作者提供)
圖七:最大池化示意圖。(作者提供)
卷積運算其實非常耗時,在特徵擷取過程中往往會衍生極大量的運算成本,因此我們可以通過池化來減少運算量。池化運算大致上可以分為平均池化(meanpooling)、最大池化(max-pooling)、隨機池化(stochastic-pooling)等。下面以平均池化和最大池化舉例說明。平均池化利用4個元素的平均來取代原本的4個元素;最大池化則為使用4個元素中最大的元素取代原本的元素。進行池化後,原本的4個元素便減少為一個特徵,可以大大減少電腦的運算量,但也因為遺棄了其他3個元素,同時可能會遇到遺失資訊的風險。
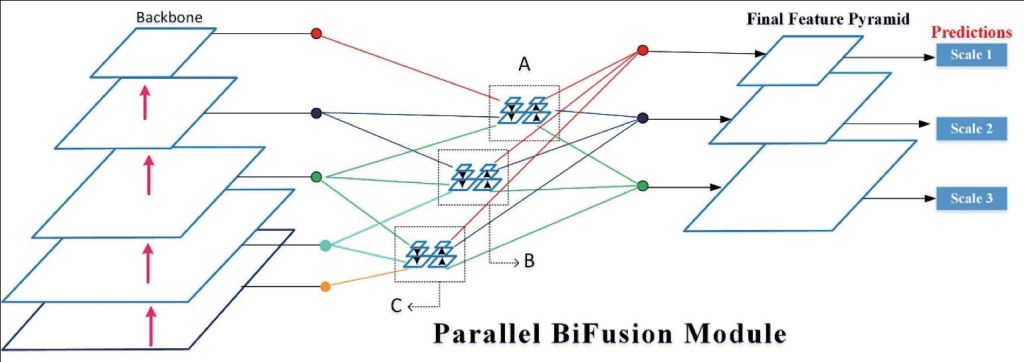
圖八:平行混合特徵金字塔架構,針對大小物件偵測,金字塔A用來偵測大物件,
金字塔B用來偵測中物件,金字塔C用來偵測小物件。(作者提供)
利用無人空拍機的機動性結合AI模型,由空拍視訊來尋找、偵測與分析特定目標物,有許多應用空間,但如何在高空即時偵測地面物件,如人、車輛、農作物、建築物,是技術落地面臨的一大挑戰。首先會碰到的困擾,是空拍影像中物件過小之問題。多數分析技術以YOLO(you only look once) 影像辨識架構如YOLO-V4來偵測物件,為了擷取有效的語意特徵,須做至少5次池化的運算,因為每一次池化都會造成物件大小縮小為1/4,經過5次後,物件會變成原尺寸的1/1024,這會使得極小物件消失。另一方面,YOLO架構還有一個大問題就是無法兼顧大、小物件同時偵測之問題。為了解決這些問題,我們提出平行混合特徵金字塔架構,利用多個混合特徵金字塔,來偵測不同大小物件。這個技術在空拍機的視角下,有非常高的準確率表現,能夠順利解決傳統方法在物件偵測上,無法同時辨識不同視角和不同大小的物件問題。
應用於智慧農業,預測產量精準施藥
智慧農業是近年來我國政府致力發展的方向之一,如果能結合無人機與人工智慧技術,將有機會協助傳統產業升級、提升農民福祉。前述所開發的方法也可以用在農作物偵測與產量預估上,如圖九是水稻田的空拍影像,其中每個紅色的小點都是秧苗,我們可以透過空拍影像,偵測與計算出水稻數量。另一個應用是分析鳳梨成長情況,如圖十是空拍機拍出的鳳梨田,每一個方形框框都是鳳梨芯的位置。

圖九:空拍水稻偵測結果圖。(教育部AI-CUP)
近年來很多農夫都開始利用無人機取代傳統人力,進行施肥及農藥噴灑的工作,如果未來能結合此處所開發的技術,那麼就能只針對有農作物的地方進行作業,減少在沒有農作物地方的浪費,將能大幅降成本、提高收益。
圖十:空拍鳳梨偵測與計數結果圖。(教育部AI-CUP)
偵測人群聚集,統計人流熱點
在另一方面,自從2020年初開始,世界便籠罩在2019冠狀病毒疾病(COVID-19)疫情下,確診後很可能造成呼吸系統不可逆的傷害,使得全世界都人心惶惶,截至今(2022)年3月9日止,COVID-19疫情已造成超過4.48億人確診感染,其中更有高達601萬人因而死亡。疫情已經流行將近兩年,雖然大部分國家正積極地注射疫苗,最近更有口服藥被發明問世,但至今每天仍有數十萬人次的新增確診人數,距離疫情結束的那天仍遙遙無期。為避免人群群聚增加染疫風險,也可利用空拍機分析人群聚集的情況,例如圖十一,透過前面所開發的物件偵測器來偵測人群聚集處,協助加以示警、疏散。
圖十一:空拍影像人物偵測結果。(作者提供)
臺灣常有不同活動舉辦,如演唱會、廟會、燈會、路跑、園遊會、甚至抗爭等,對主辦者而言,想統計出有多少人潮、哪些展館是熱點、哪那些商品是熱銷,這些資訊都是非常重要的。從前在推算集會遊行或造勢晚會的人數時,大部分的做法都是利用活動面積去乘上單位面積的人數來進行估算,但容易受到外在因素所影響。如前面提到的YOLO偵測方法在面對遮擋或密集人群時,往往會有所失準,無法準確的評估人數,特別是對大規模的密集人群,如超過千人以上的擁擠人群,很難正確計數。因此,可以改採取用熱點圖為基礎之人群計數技術,藉由生成人群的熱力圖,如圖十二,人群計數就變成對熱力圖的積分計算,進而計算每平方米的行人密度與聚集程度。
圖十二:空拍影像密集人群偵測。(a) 原圖;(b) 熱點圖。(作者提供)
協助導航避免道路壅塞
近年來,如何解決道路壅塞問題受到關注,現存最常見的個人交通輔助設備是導航系統,但一般的導航裝置僅規畫最短路徑,沒有考量變動的交通流量,無法依據不同路線的車流量動態地規畫最佳路徑。過去有利用行動裝置或者道路攝影機取得路況,提前告知駕駛繞道以減緩壅塞問題的方案,但這類方法存在資訊過剩或不足的問題。即多個裝置所截取同一路段的影像,當已有足夠的資料量即可判定壅塞,若同一路段的駕駛還是持續提供資訊就會變成不必要的資料;而當一路段皆未有駕駛提供路段資訊,則會造成資訊不足無法判定壅塞的情形。
為避免須由駕駛人主動提供資訊所造成的問題,我們可利用無人機空拍照來建立影像資料庫提供路況資訊。無人機最大的優勢就在於機動性高,能夠依需求拍攝出各種視野、角度、高度的道路街景圖,再加上本團隊的研究成果在微小物件的區分上極出色,能以更多元、更彈性的方式來進行車流分析。除了偵測出車輛外,甚至還能進一步分辨出機車、汽車、卡車等,提供更準確的偵測結果。舉例來說,圖十三為各類車輛偵測的結果,可分出不同的車輛;圖十四(a)則顯示偵測戶外停車場的空位;(b)則為模糊影像的偵測結果(地點:臺北市政府);(c)則為高速公路的車流分析;圖十五為白海豚偵測的結果。
圖十三:車輛偵測結果。(國立陽明交通大學運輸與物流管理研究所提供)
圖十四:從空拍影像做車輛偵測的結果圖。(a)清楚影像;(b)模糊影像;
(c)高速公路之車流分析。(資策會提供;國立陽明交通大學運輸與物流管理研究所提供)
圖十五:白海豚偵測之結果。(臺灣大學周蓮香教授提供)
近年來,無人機的硬體技術已逐漸成熟,而人工智慧的技術也正以超乎想像的速度進步。透過開發及整合各樣的AI模型,人工智慧不再只是艱澀難懂的資訊科學,以「智慧空拍機」為例,人工智慧的技術也能在稀鬆的日常間,完成從前認為是科幻片中出現的任務。過去沒有想過能自動化的事情,仰靠人工智慧的技術,也許在不久的未來,都能一一完成。
參考文獻
1. Alexey Bochkovskiy et al., Yolov4: Optimal speed and accuracy of object detection, arXiv, 2020.
2. Yann LeCun et al., Gradient-based learning applied to document recognition, Proceedings of the IEEE, 1998.
3. Ping-Yang Chen et al., Parallel Residual Bi-Fusion Feature Pyramid Network for Accurate Single-Shot Object Detection, IEEE Transactions on Image Processing, 2021.